Réges régen kaptam egy hibás távirányítós autót unokatestvéremtől, amiből évfolyamtársaim segítségével egy "marsjárót" terveztünk készíteni a Magyarok a Marson robotépítő versenyre.
A projekt akkor idő és elszántság hiányában félbemaradt, az autó pedig jó időre felkerült a padlásra.
Idén áprilisban részt vettem Sopronban a Drón és Robotika Shown, ahol többekkel beszélgetve, leginkább a Magyar Robotépítők Egyesületének standjánál szerzett benyomások hatására elhatároztam, hogy felfrissítem az autós projektet.
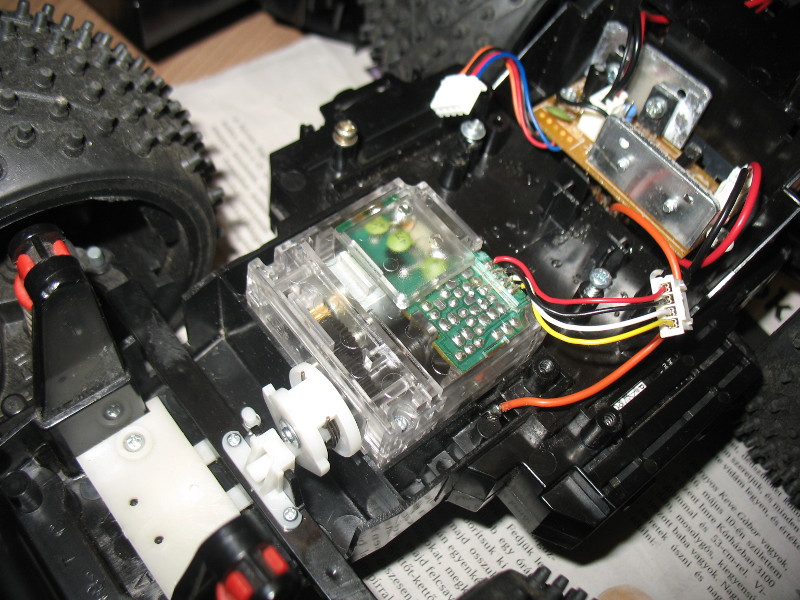
Íme az autó:

A Ni-Cd akkumulátor feltöltésével kezdtem, ami legnagyobb meglepetésemre a sok évnyi állás után is jó állapotban van. Úgy látszik, érdemes volt feltöltött állapotában eltenni.

Az autó központi vezérlőegysége hibásodott meg, de a motorvezérlés és a kormányszervó jól működik. A vezetékek szerepének és jelszintjeinek felderítésével folytattam.
A motorvezérlőből 4 vezeték érkezik a vezérlőegységhez. A piros és fekete a tápvezetékek, a narancs és a kék pedig a hajtásnak a vezérlői. A nagyáramú panelen látható tranzisztorok alapján sejthető, hogy egy H-bridge motorvezérléssel állunk szemben, aminek a narancs és a kék vezetékek az előre-, illetve a hátramenetért felelős vezérlő bemenetei. Egy darab vezetékkel tápfeszültséget adva a jelvezetékekre ez be is bizonyosodott.
Fontos, hogy a bemenetek ellenállásai a nagyáramú panelen találhatóak. Ellenkező esetben nem lett volna szerencsés ellenállás közbeiktatása nélkül, közvetlenül tápfeszültségre kapcsolni a tranzisztorok bázisait.
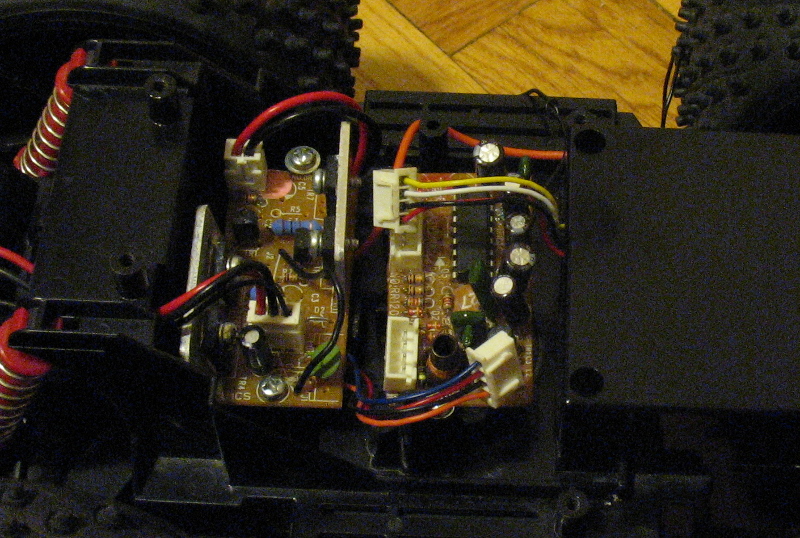
Következett a kormánymű vezérlésének feltérképezése. A négy vezeték alapján egy négyvezetékes szervómotorra tippeltem, de alaposabb tanulmányozás után rájöttem, hogy a Nikko nem bonyolította túl a dolgokat, a hajtáshoz hasonlóan ide is egy H-bridge meghajtót tett. A piros és a fekete vezetékeknek eleve gyanút kellett volna ébresztenie. A vezérlő panel hátulján a vezetékeket csatlakozótól csatlakozóig követve már látható is volt, hogy a piros és a fekete itt is értelemszerűen a tápfeszültséget adják, a fehér és a sárga pedig a Nikko egyedi vezérlő chipjének lábaira vannak kötve. Egy ellenálláson keresztül tápfeszültséget kapcsolva a fehér majd a sárga vezetékre már fordultak is az autó első kerekei.
A hibás központi panellel nem voltak további terveim, hiszen nem távirányítani szeretném az autót, hanem egy saját fedélzeti vezérlőt építenék rá. Adta magát, hogy a vezérlőpanel helyére készítsek egy méretazonos, úgynevezett breakout kártyát. Ha sikerül a csatlakozókat kiforrasztani a vezérlőegységből, vagy megtalálni a típusát és újakat beszerezni, akkor igényesen kivitelezhetem az autó csatlakoztatását a kiszemelt fedélzeti számítógéphez. Egy elektronikai alkatrészbolt katalógusában meg is találtam a csatlakozókat: 622/4 névre hallgatnak. Létezik 6 vezetékes változat is ebből a csatlakozócsaládból, így egy könnyen csatlakoztatható kábelköteggel ki tudom vezetni a tápfeszültséget, valamint a hajtás és a kormányzás vezérlőjeleit.
Az új vezérlőegység csatlakoztatása szempontjából fontos ismerni a vezetékeken megjelenő áramerősségeket, így ezek kimérésével folytattam.
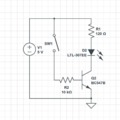
Kedvenc multiméterem közbeiktatásával is megjárattam a motorokat, és megmértem a tápvezetékeken jelentkező nagyobb, valamint a jelvezetékeken jelentkező kisebb áramokat is.
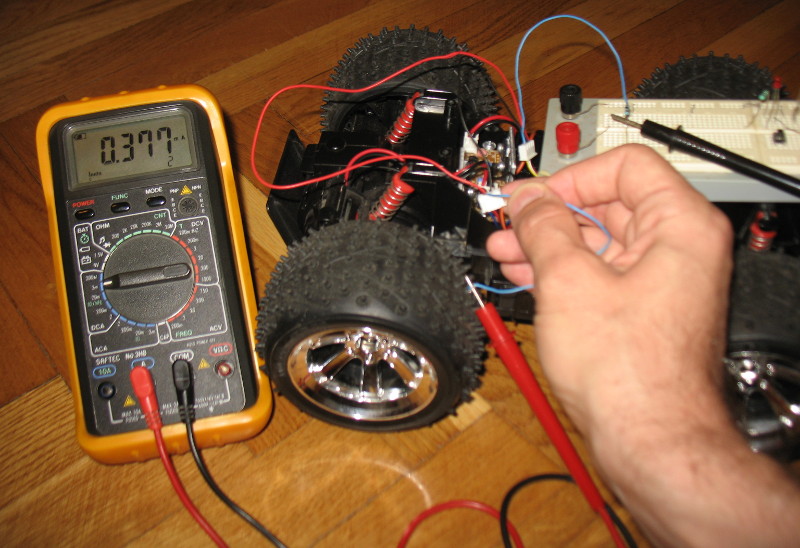
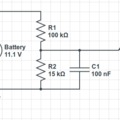
A régi vezérlőegységen a jelvezetékek egy-egy 10 kΩ-os ellenálláson mentek keresztül, így ilyen ellenállásokat iktattam közbe én is a méréshez.
A hajtómotor áramfelvételét szabadon forgó, valamint lefogott kerekekkel is megmértem, mert a két érték között jelentős különbség is lehet.
Az eredményeket az alábbi táblázat tartalmazza:
Hajtás:
| Szín | Szerep | Áramok |
| Piros | +9.6 V | 0.5 A szabadon, 2.2 A állóra fogva |
| Fekete | GND | |
| Narancs | előre | 0.8 mA @ 9.6 V, 0.3 mA @ 5 V |
| Kék | hátra | 0.8 mA @ 9.6 V, 0.3 mA @ 5 V |
Kormányzás:
| Szín | Szerep | Áramok |
| Piros | +9.6 V | 1A |
| Fekete | GND | |
| Fehér | jobbra | 0.7 mA @ 9.6 V, 0.3 mA @ 5 V |
| Sárga | balra | 0.7 mA @ 9.6 V, 0.3 mA @ 5 V |
Első lépésnek ez megteszi, innen folytatom legközelebb.