Tegnap csak félig volt időm összerakni az autót, így most folytatom.
A Freedom boardról érdemes tudni, hogy GPIO lábanként maximum 25 mA-rel, összesen maximum 100 mA-rel terhelhetjük. Ezt, és további lényeges specifikációkat a kártyán található mikrovezérlő adatlapjából tudhatunk meg.
Mivel egy LED áramfelvétele közelíti a 20 mA-t, ha több LED-et szeretnénk együtt vezérelni, egy teljesítmény-, vagy végfokozatot kell közbeiktatni. Ez a teljesítményfokozat a legegyszerűbb esetben egy szimpla NPN tranzisztorból állhat, ahogy a rajzon is látható:
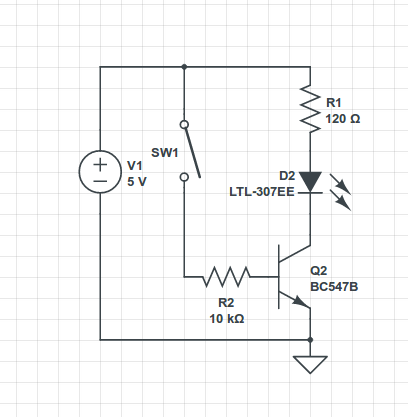
A BC547-es tranzisztornál 0.7 V-os feszültségeséssel számolhatunk a bázis és az emitter között, tehát 5 V-os tápfeszültség mellett (5 V -0.7 V) / 10 kΩ = 0.43 mA terheléssel számolhatunk az SW1 kapcsolón. 800-szoros erősítéssel számolva bőven szaturációba visszük a tranzisztort, annak kollektorárama ugyanis maximum 100 mA lehet.
Ilyen tranzisztorok közbeiktatásával a Freedom board 3.3 V-os kimenő jelével meghajtva is bőven kapcsolóüzembe visszük a tranzisztort, a GPIO lábon jelentkező terhelés pedig mégkisebb lesz.
Az áramkör rajzolásához a Circuitlab nevű online áramkörtervezőt használtam, mely nem pusztán egy rajzoló, hanem egy szimulációt is lehetővé tevő komplett tervezőprogram. Érdemes kipróbálni.
A 100 mA-es maximális terhelhetőség miatt 4 db közel 20 mA terhelést jelentő LED-et kényelmesen meghajthatunk egy ilyen tranzisztorral.
Így ilyen tranzisztorokból építettem fel a meghajtó fokozatokat
- a 2 első "nappali fényhez" és a 2 hátsó helyzetjelzőhöz
- a 2 bal oldali irányjelzőhöz
- a 2 jobb oldali irányjelzőhöz
- a 2 "reflektorhoz"
- a 2 féklámpához
- a 2 tolatólámpához
Tehát összesen 6 db tranzisztorra és báziellenállásra van szükség, a teljesítmény pedig az első pontot kivéve bőven a határ alatt marad.
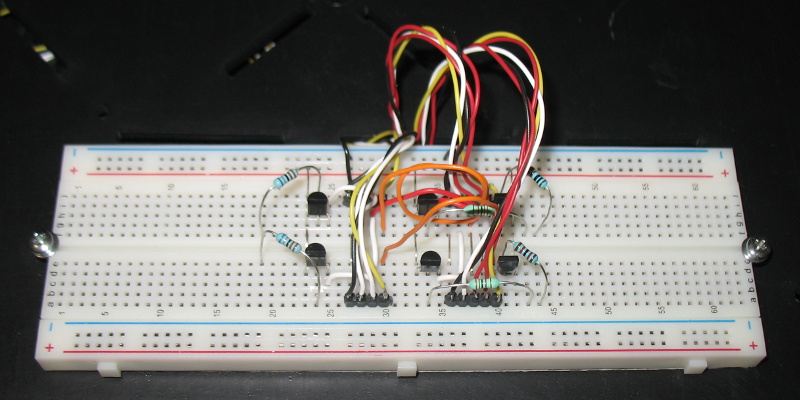
A breadboardon elhelyeztem a tranzisztorokat, ellenállásokat, összekötöttem a LED-ek összetartozó anódjait, bekötöttem a "földet", vagy negatív pólust.
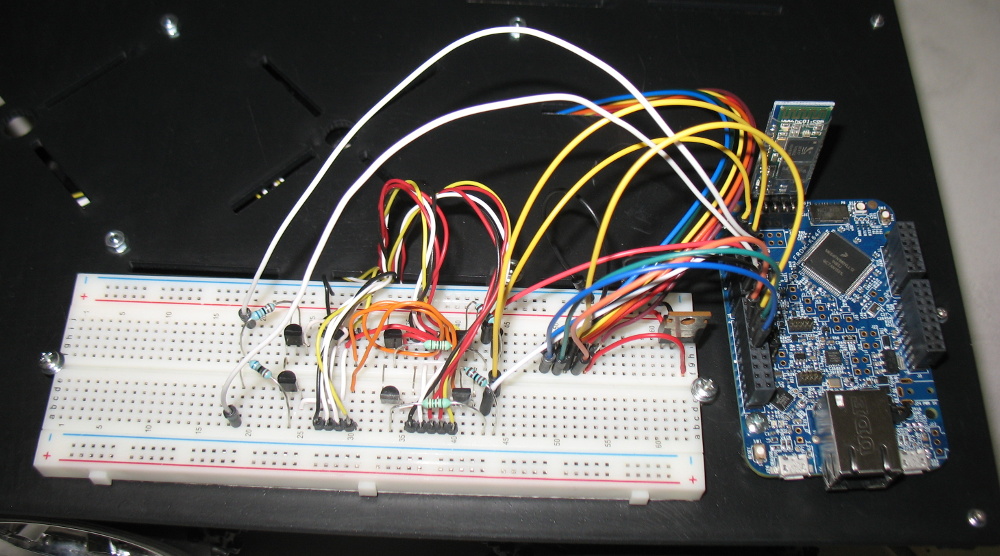
A motorvezérlés ellenállásait a breakout kártyán helyeztem el, így az alvázból érkező vezetékeket közvetlenül a Freedom board PWM kimeneteire köthettem. Kerestem további szabad GPIO kivezetéseket is a kártyán, és bekötöttem a lámpák tranzisztorainak bázisait is.
A Freedom boardot nem csak USB-n keresztül lehet táplálni, hanem az egyik csatlakozófején keresztül 5V-os stabilizálatlan, vagy 3.3 V-os stabilizált tápfeszültséget adhatunk neki.
Egy 7805-ös feszültségstabilizátorral 5V-ot állítottam elő az autó akkumulátorának 9.6 V-jából, ezt kötöttem be a Freedom board tápfeszültségbemenetére.
Felcsavaroztam az alaplemezt az alvázra, feltettem az autó akkumulátorát töltőre, és kíváncsian várom a főpróbát a holnapi Kutatók Éjszakája előtt.