Az eredeti motorvezérlő már a végét járta, így amikor legutóbb szétszedtem az autót, azt is kicseréltem. Az eredeti H-hidat alkotó BJT tranzisztorok (pl. BD136, de mind a négy különböző volt!), valamint az ezeket vezérlő két tranzisztor sem teljesítette már az eredeti specifikációkat.
H-híd
Ahhoz, hogy az autó előre és hátra is tudjon haladni, kétféleképpen kell tudnunk a tápfeszültséget a meghajtómotorra kapcsolni. Erre egy bevált elmés kapcsolás a H-híd, melyet ez a Hobbielektronika cikk teljesen jól bemutat. H-hidat lehet építeni önálló tranzisztorokból, de vehetünk komplett kapcsolást tartalmazó integrált áramkört is. Mindkét esetben a tranzisztorok típusa lehet hagyományos bipoláris (másnéven BJT, darlington) vagy (MOS)FET. Előbbiek előnye, hogy rendkívül olcsók (így az ezekre épülő IC-k, modulok is, pl: L293D, A8825), hátránya a viszonylag nagy disszipáció, amit nem kellő gondossággal összeválogatott tranzisztorok, a szaturáció helyett a lineáris régióban történő használat, valamint a terhelés és a vezérlés (lásd: DC gain) nem megfelelő illesztése okozhat. A FET-ekre épülő megoldások (pl: DRV8844) valamivel drágábbak, de sokkal egyszerűbben lehet őket jól használni és adott méret mellett általában nagyobb áramok elviselésére alkalmasak.
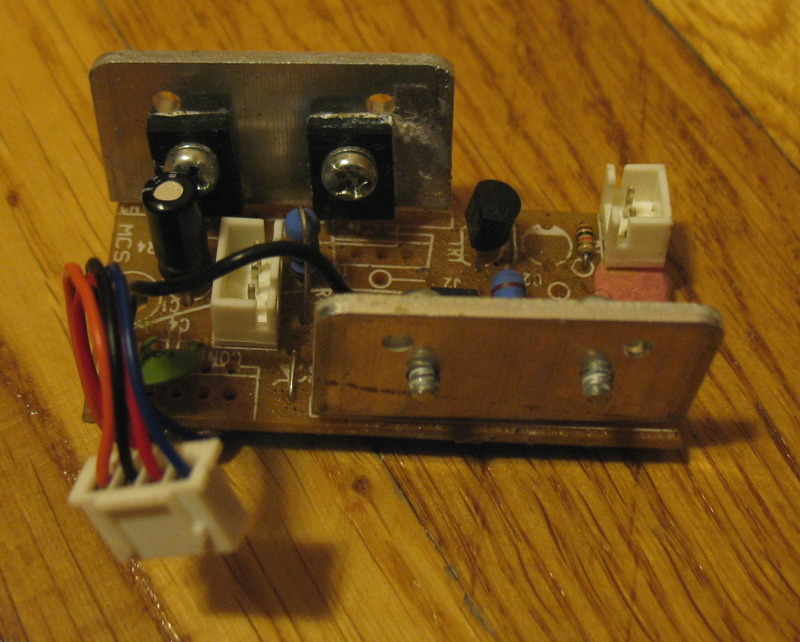
Az eredeti motorvezérlő
Az eredeti motorvezérlő önálló BJT tranzisztorokat tartalmazott (két NPN, két PNP), de ezek mind különböző típusúak voltak. Közös jellemzőjük, hogy maximum 1.5 A terhelésre tervezték őket, ami annak ismeretében, hogy 9.6 V-nál, állóra fogott kerekeknél 2.2 A-t vett fel a motor, éppen, hogy elégségesnek bizonyult.
Az akkumulátorcsere és az új tápegység megépítése után a motort ráadásul valamivel magasabb feszültséggel (igaz PWM-ezve) üzemeltettem.
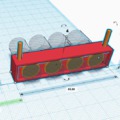
IBT-4 motorvezérlő
Az általam választott motorvezérlő egy MOSFET-eket tartalmazó modul:
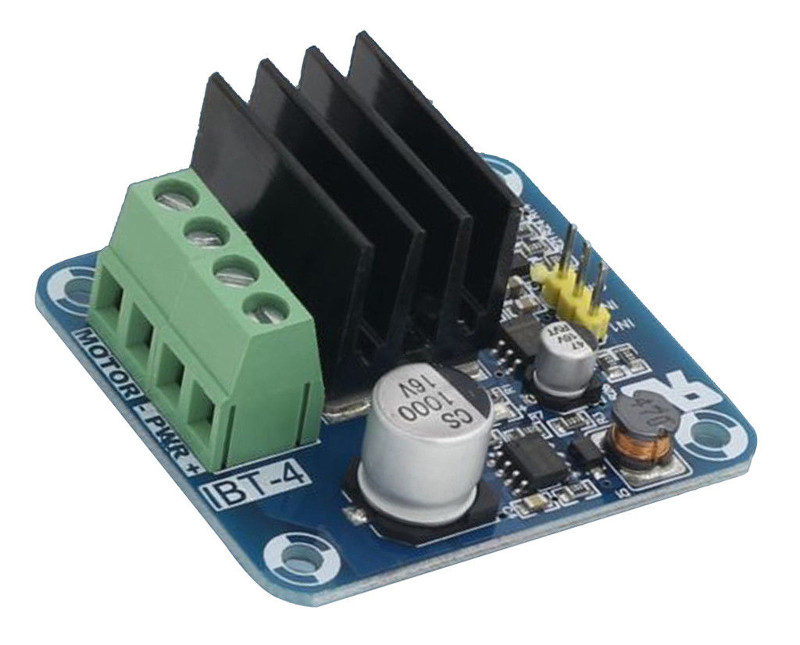
A maximum 50 A-es terhelhetőség több, mint elégséges, ennek ellenére rendkívül kompakt méretű. A be- és kimenetei, a tápellátása elektromos szempontból triviálisan beköthető a régi vezérlő helyére.
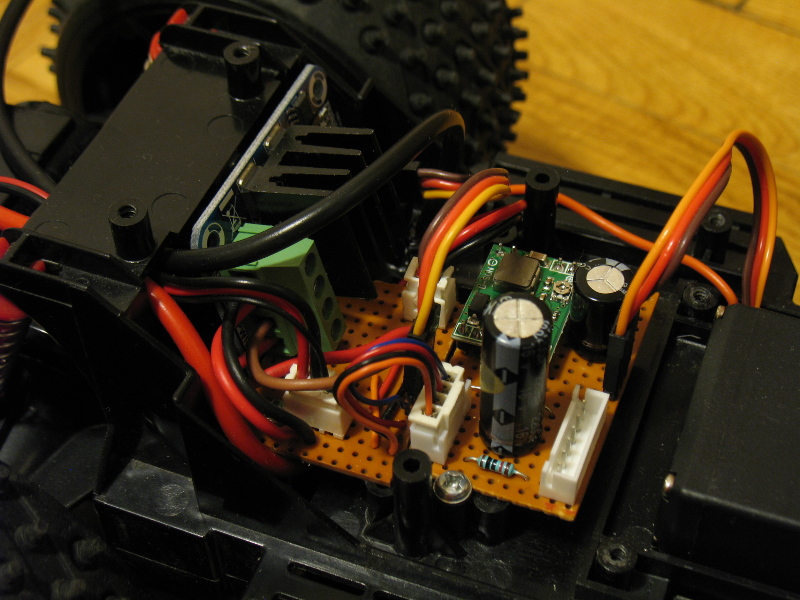
Összekötő NYÁK
Az eredeti motorvezérlő NYÁK további funkciója volt, hogy az akkumulátorból érkező tápfeszültséget továbbítsa a kormánymű felé. Ezért (valamint azért, hogy a motor valamint az akku felé menő vezetékek csatlakozóit a könnyebb szerelhetőség és a rendezettebb kialakítás miatt megtarthassam) egy összekötő NYÁK-ot készítettem, aminek az a különlegessége, hogy se aktív, se passzív alkatrészeket nem tartalmaz, csak csatlakozókat és vezetékeket. :)
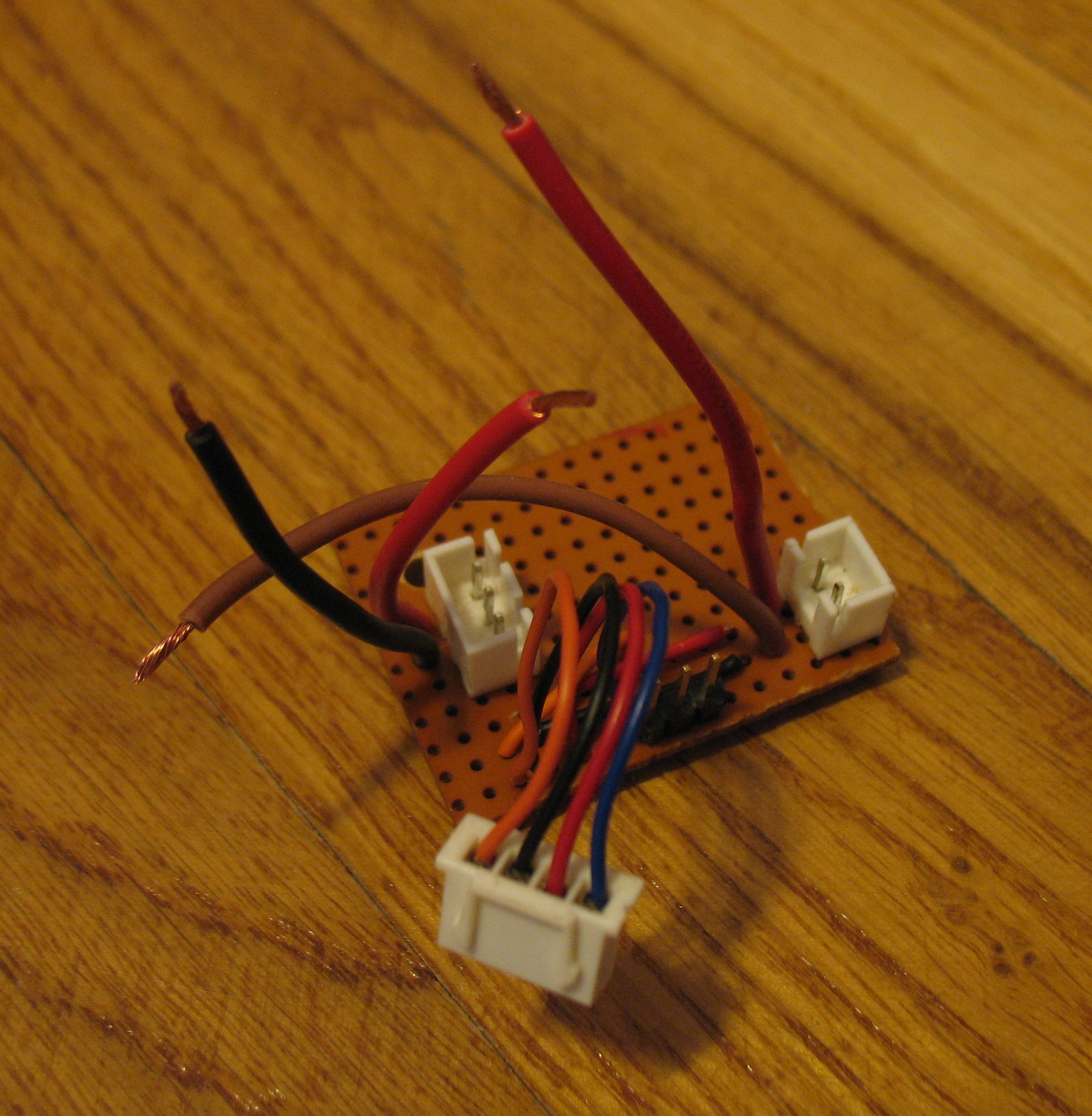
Az egész művelet során az egyetlen kérdés az volt, hogy miért megy 3 vezeték a motorhoz. A vastagabb piros és fekete egyértelműen a motor termináljaihoz vezet, de van mellettük egy vékonyabb fekete. Az eredeti vezérlő NYÁK-ján visszakövetve kiderült, hogy valóban a két vastagabb a H-hídból a motorhoz vezet, a vékonyabb fekete pedig a GND. Nem látszik, így csak sejtem, hogy ez a 3. vezeték a motor fémházához, ill. az oda forrasztott kondenzátorokhoz csatlakozik. Ez a motor által keltett elektromos zaj elnyomása miatt szükséges.
Beépítés
Az összekötő NYÁK az eredeti motorvezérlő helyére rögzítve egyúttal a helyén tartja az IBT-4-es modult is. Arra kellett figyelni, hogy az IBT-4 ne okozhasson zárlatot a közvetlenül alatta található kapcsoló termináljain, valamint az összekötő NYÁK se okozhasson azon zárlatot. Ezt egy szigetelőlap beépítésével biztosítottam.
A vezetékek összekötése után jöhetett a próba, majd az összeszerelés.
Teszt
Az eredeti motorvezérlővel az autó különösen hátramenetben volt vérszegény, már volt, hogy csak "hintáztatva" indult el hátrafelé. A szoftveren nem változtattam, így 90%-os PWM jellel próbáltam ki először az új hajtást.
Korábban soha nem látott teljesítmény szabadult a hátsó kerekekre, így – amíg a sebességszabályozás nem készül el – 20%-os PWM jellel működtetem a járművet, így beltérben is használható. Ez persze a fejlesztés további irányára is hatással lehet: megnyílt az út az autonóm driftelés előtt. :)