Ahogyan azt már korábban említettem, az elektronikát és későbbi bővítményeket hordozó alaplemezt egy munkatársam révén lézervágással van lehetőségem kivitelezni. Ehhez vektorgrafikus formában kell átadni a terveket. A tervezést a már bevált TinkerCAD-ben folytatom, aminek a legfőbb előnye, hogy a korábban készített objektumokat importálhatom a tervembe, így nem kell A furatok pozícióit méricskélni és számolgatni.
Első lépésként "ungroup"-oltam a lámpatesteket, majd tömör anyagúra változtattam a csavarokat, és a fő blokkal együtt exportáltam STL formátumban:
Majd az alaplemezt szerkesztve importáltam a fájlokat, és "lyukká" változtattam az objektumokat. A lámpatesteket a helyükre mozgatva a csavarok szépen, pont a megfelelő helyen lyukasztják ki az alaplemezt:
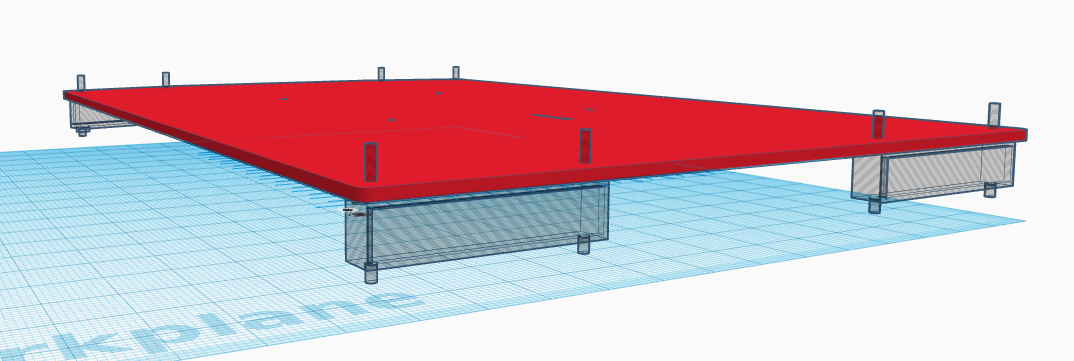
Így megspórólható egy csomó mérés és számolás, az eredmény pedig biztosan pontos lesz.
Az autóhoz 4 csavarral rögzítem a lemezt, melyek eredetileg a műanyag karosszériát rögzítették az alvázhoz. Ezek pozíciói pont alkalmasak a célra, így be is jelöltem őket az alaplemezen "lyuk" anyagú, 3 mm átmérőjű hengerekkel. Hasolnó módon a breakout kártyából érkező vezetékek számára is nyitottam egy rést.
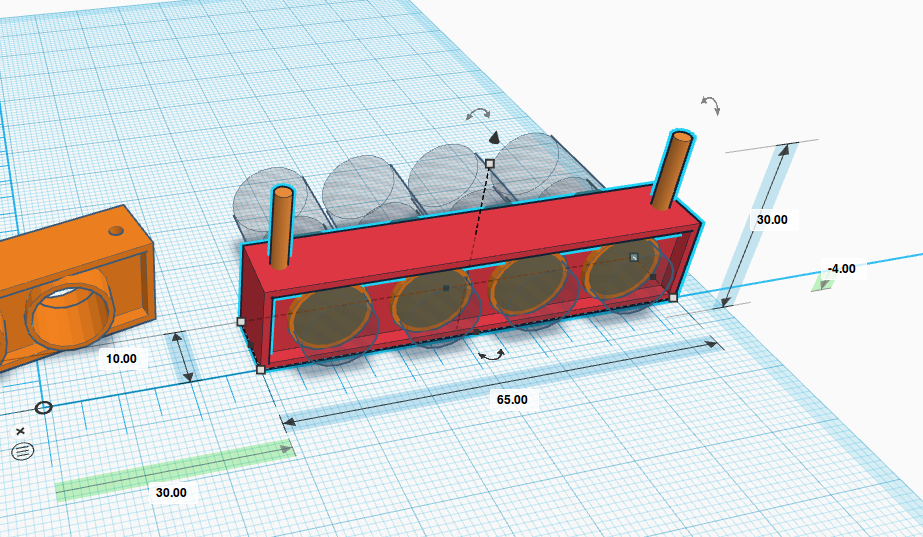
Az elektronika rögzítéséhez is érdemes most elkészíteni a rögzítőpontokat. A lámpatestekhez hasonlóan lemodelleztem a Freedom board és egy forrasztásmentes breadboard befoglaló formáját, majd a rögzítő csavarokat jelképező hengerekkel "group"-oltam őket, így szabadon mozgathattam a térben, hogy megtaláljam az optimális helyüket.
A Freedom boardnak van egy USB és egy Ethernet csatlakozója, melyeket mindenképp hozzáférhetővé szerettem volna tenni, így ennek a kártyának ezt az oldalát az autó bal hátsó széléhez igazítottam. Így könnyű lesz majd az USB porton keresztül szoftvert frissíteni. Az Ethernet csatlakozón át később esetleg egy fedélzeti Raspberry Pi-t fogok csatlakoztatni, mely komolyabb számítási teljesítménnyel tudja támogatni a majdani autonóm működést. Emiatt nem tettem ki a kártyát teljesen az alaplemez szélére, hogy ne nyúljon majd ki oldalra az UTP kábel.
A breadboardot pedig a lehető legközelebb tettem, hiszen sok vezeték fut majd a két egység között. Fontos szempont volt az is, hogy a breakout kártyáról érkező vezetékek igényesen meg tudjanak ide érkezni, ezért a számukra vágott rés mellé helyeztem ezt az egységet.
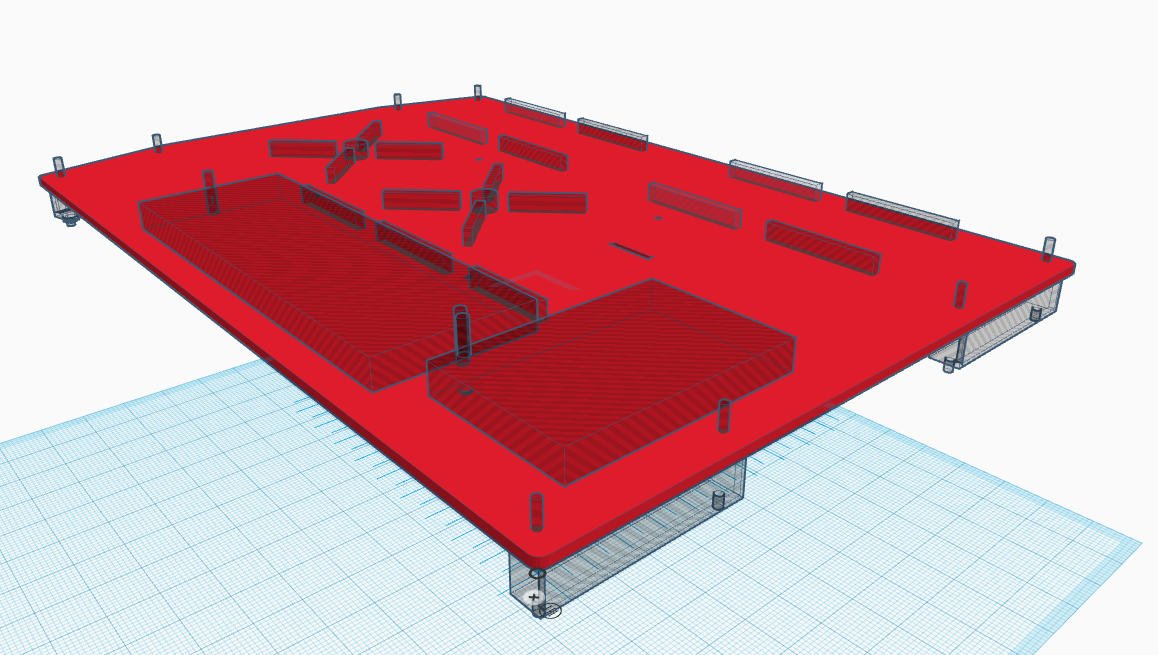
A breadboard mellé terveztem réseket, melyeken át az alaplemez alatti perifériák, pl. lámpák, kerékfordulat számláló, stb. vezetékei juthatnak felszínre, valamint elhelyeztem további rögzítési pontokat a bővíthetőségért.
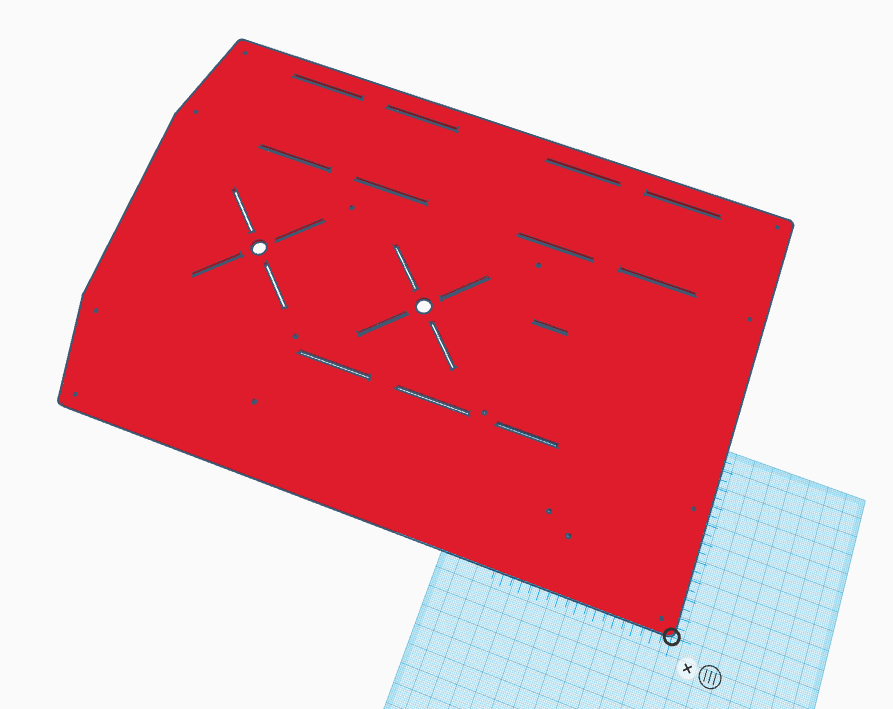
A kereszt alakú rögzítési pontok lehetővé teszik különböző méretű (18 és 55 mm közötti "osztókörrel" rendelkező) négyzetes felfogatású elemek rögzítését. Fontosnak tartottam, hogy előre nem látható méretű alkatrészek is könnyen rögzíthetőek legyenek az alaplemezre. Ezeket a kereszteket egyszerűbb volt a koordinátarendszer tengelyeivel párhuzamosan elkészíteni, majd "group"-olva őket a helyükre tenni, végül 45°-al elforgatni.
Jobb oldalra pedig 5 cm nyomtávval kerültek rögzítő rések, melyeket több helyen megszakítottam, hogy megőrizzem az alaplemez merevségét. A végeredmény, az összes komponens "group"-olása után, a lenti képen látható. Ezt a formát exportáltam SVG formátumban és adtam át lézervágásra. Kíváncsian várom az eredményt.