Felmerült, hogy Kutatók Éjszakáján csinálhatnánk egy közös standot munkatársaimmal, ahol az érdeklődőkkel (elsősorban gyerekekre számítunk) közösen építenénk egyszerűbb áramköröket, készítenénk egyszerűbb példaprogramokat mikrovezérlőkre. Ennek kapcsán egyik munkatársamtól kaptam egy ARM Cortex-M processzoros, FRDM-K64F névre hallgató demókártyát, amit az ARM mbed környezetben rendkívül egyszerű programozni. Annyira megtetszett a pofon egyszerű PWM vezérlés valamint a Bluetooth kapcsolat lehetősége, hogy el is határoztam, hogy a korábbi terveimmel szemben ezt a kártyát építem majd az autóra a TI Launchpadom helyett.
A "Freedom board" a HC-05-ös Bluetooth modullal kiegészülve: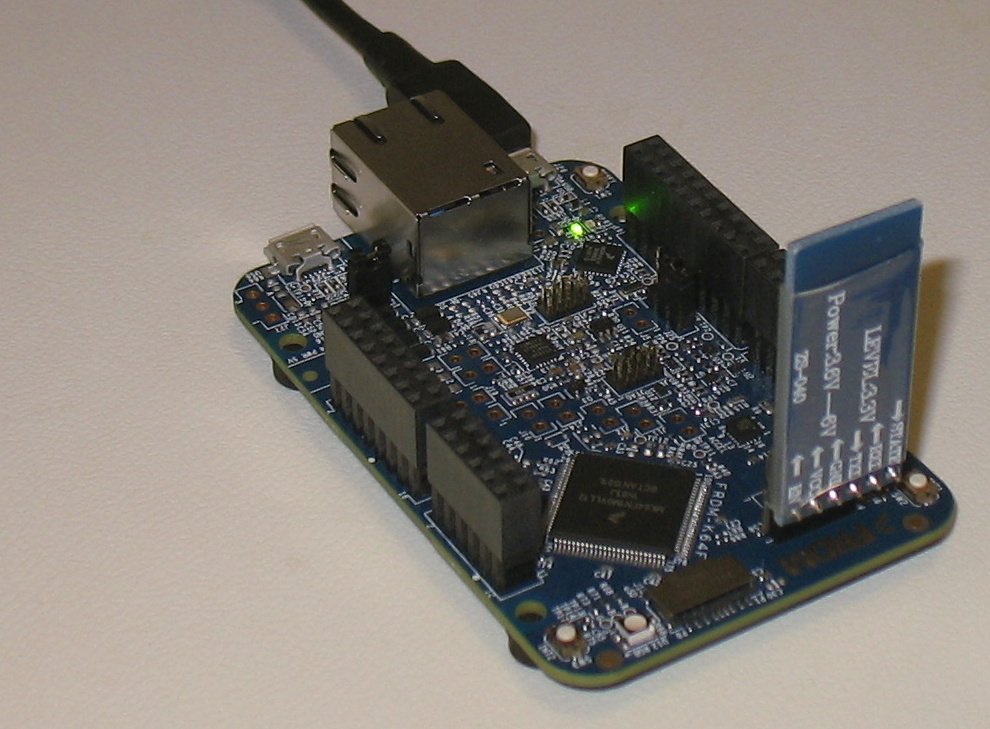
A HC-05-ös (ill. 06-os) BT modulok a Bluetooth Serial Port Profile-t (SPP) implementáló UART gatewayek. Ha például a telefonunkon futtatunk egy Bluetooth Serial Terminal programot, akkor közvetlen soros kapcsolatot kapunk a mikrovezérlőnkhöz - vezeték nélkül. Ennek a programozásáról írok majd új posztot.
A Kutatók Éjszakájára látványos bemutatódarab lenne az autó az egyszerűbb bemutatókapcsolások mellett, így a projekt újabb lendületet vett.
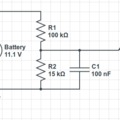
Teszteltem, hogy a PWM kimenettel mennyire szabályozható az autó hajtása. Az autó motorvezérlőjét a saját akkuja táplálta, a Freedom boardot pedig egy USB-s powerbank, pusztán a föld- és jelvezetékeket kellett összekötni, utóbbit egy extra 1kΩ-os ellenálláson keresztül a biztonság kedvéért:
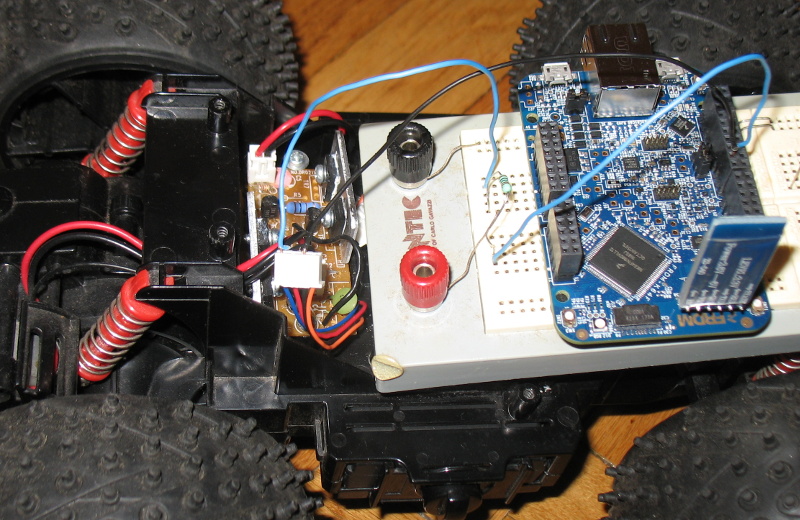
10 kHz-es vezérlőjellel szuperül szabályozható mind a motor, mind a kormányzás!
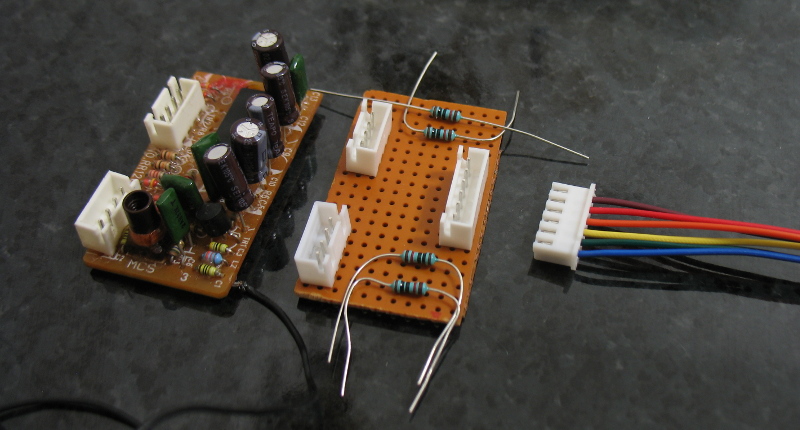
Közben sikerült felderítenem a csatlakozók típusát (a kínai JST gyár XH sorozatáról van szó, de egy közeli elektronikai boltban 622/4 névre hallgat), vettem is és találtam itthon egy pont megfelelő szélességű maradék próbaNYÁK-ot, így előkészítettem a breakout kártyát:
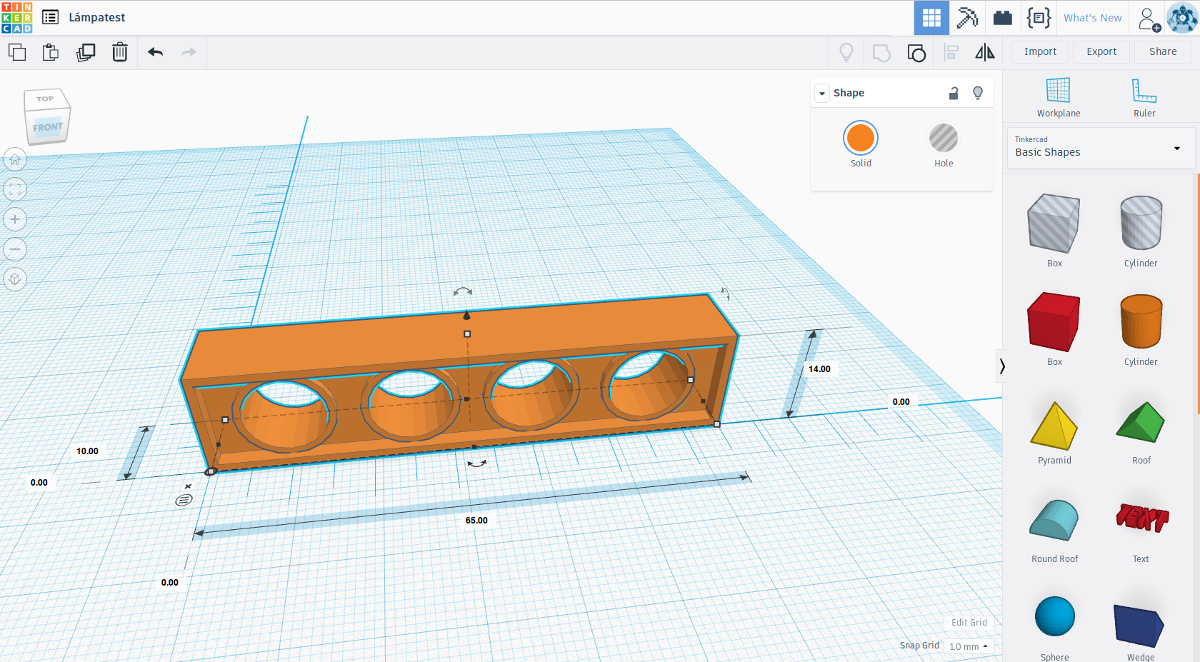
A vezérlőegységnek rengeteg kimenete van, így az az ötletem támadt, hogy legyenek az autónak lámpái és irányjelzői is. Ezeket 10 mm-es LED-ekből tervezem. A cégnél van 3D nyomtatónk, azzal profi tartókat lehetne nyomtatni a LED-ekhez, és könnyen lehetne rögzíteni a "lámpatesteket" a lézervágott alaplemezre.
Ennek az az értelme lenne, hogy rögtön kapunk egy csomó új perifériát, amiknek a vezérlése már összetettebb feladat, ráadásul látványos is, így még megfelelőbbé teszi az autót oktatási célokra.
Újra a TinkerCAD-et hívtam segítségül és elkezdtem rajzolgatni benne. Bármilyen más 3D tervezőprogram is megteszi, amiből lehet STL formátumban exportálni a terveket.
A következő posztban a lámpák legyártásáról és a 3D nyomtatás rejtelmeiről írok majd.