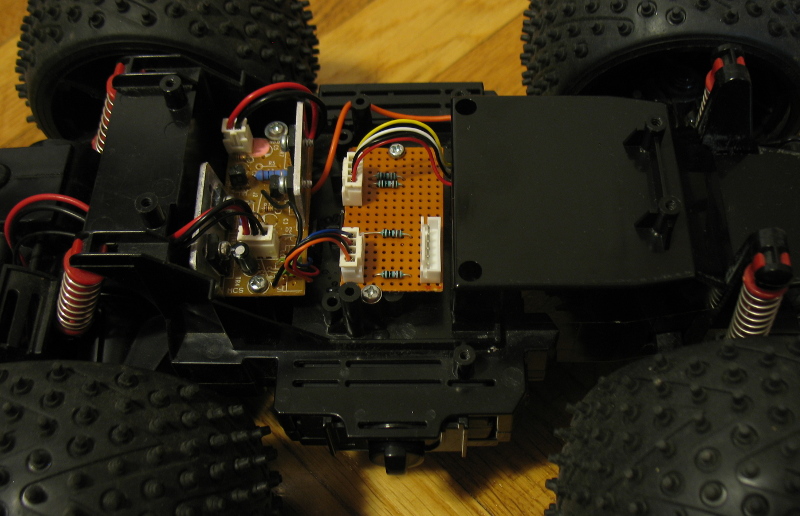
Ahogy ígértem, a sok szoftveres írás után foglalkozom újra a hardverrel. Két területet szeretnék jelenleg fejleszteni: A lámpák tranzisztorait, ill. csatlakozóit szeretném egy nekik dedikált NYÁK-ra áttenni, hogy helyet csináljak a breadboardon a következő fejlesztésekhez, valamint az autó áramellátását szeretném átalakítani egy nagyobb kapacitású Li-Po akku, valamint hatékony DC/DC konverterek beépítésével, mert a gyári 650 mAh-s NiCd akku kevésnek bizonyult a nyilvános demókon tapasztalt nagy érdeklődés mellett.
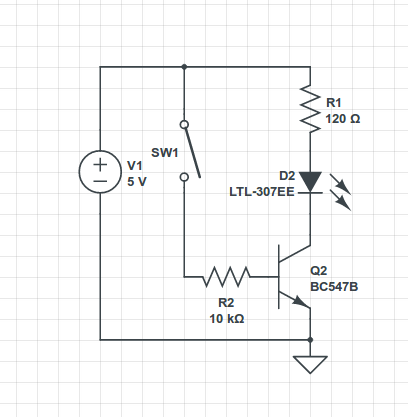
Ebben a cikkben a tápellátást érintő újításokról, a következőben pedig a lámpákat érintő fejlesztésről írok.